|
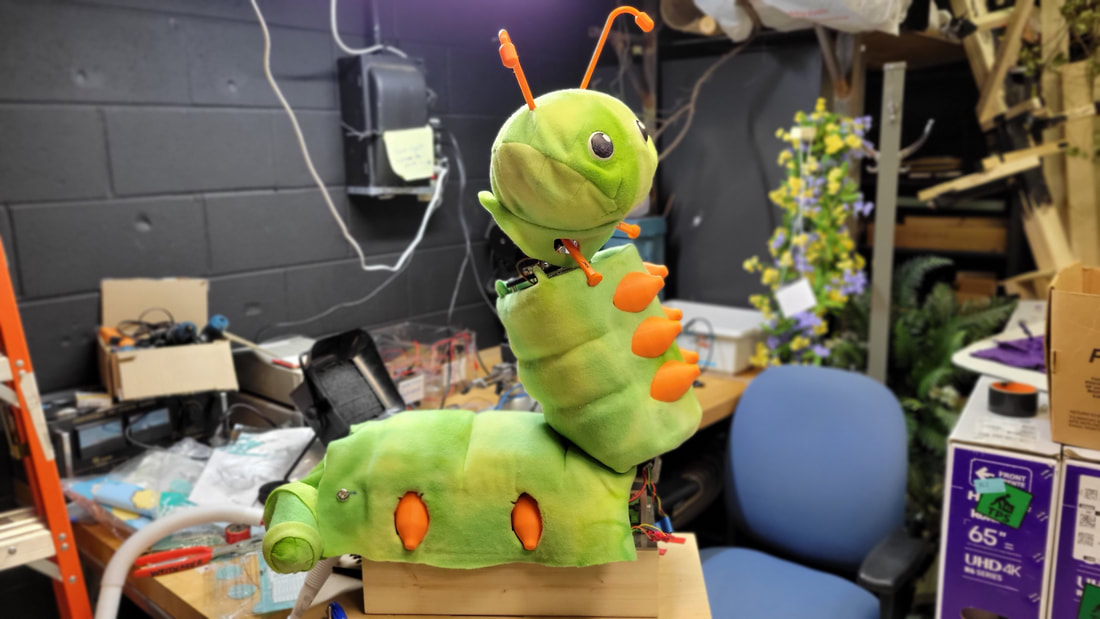
As the culmination of my engineering studies, I conceived and executed an interactive animatronic caterpillar. Leveraging the Python library Mediapipe, the caterpillar seamlessly tracks a viewer's movements through a camera, determining the appropriate pose to adopt. This data is then transmitted to an Arduino via UDP, which orchestrates the motions of the motors and servos. Effectively, the caterpillar functions akin to a 4-degree-of-freedom (DOF) robot arm, creatively reimagined in the form of a charming caterpillar. My responsibilities encompassed the comprehensive design of the head, which boasts 2 DOF, as well as the creation of articulated pincers, each with 1 DOF. Additionally, I oversaw the fabrication of the entire caterpillar and took charge of the intricate programming for both the Mediapipe and Arduino components.
|

|
|
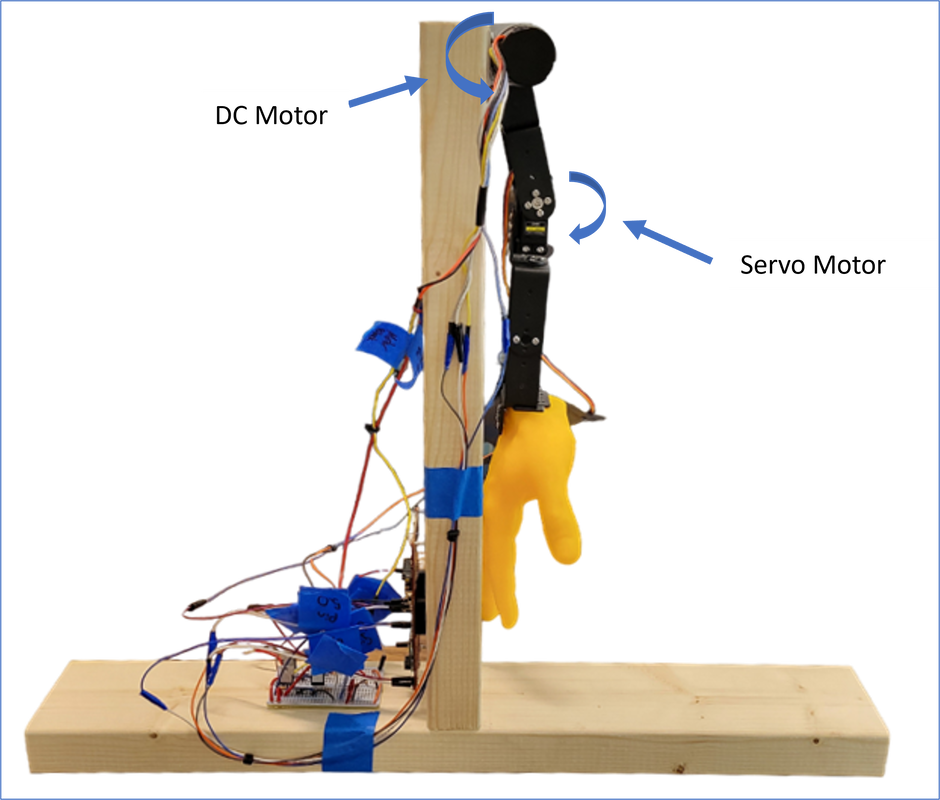
Presenting a dynamic mechatronic arm, meticulously engineered to replicate a user's real-time arm movements. Powered by the versatile Python library, Mediapipe, the system precisely captures and interprets the angles of the user's shoulder and elbow joints. These precise measurements are then transmitted in serial fashion to an MSP432 microcontroller, orchestrating seamless emulation of the user's motion. The arm features a strategically integrated DC motor for shoulder articulation and a precise servo motor for the elbow joint. The entirety of the mechanical and electrical systems were conceived and developed by my hand. Furthermore, I undertook the extensive task of programming both the Mediapipe code and the MSP432 firmware.
|
|
|
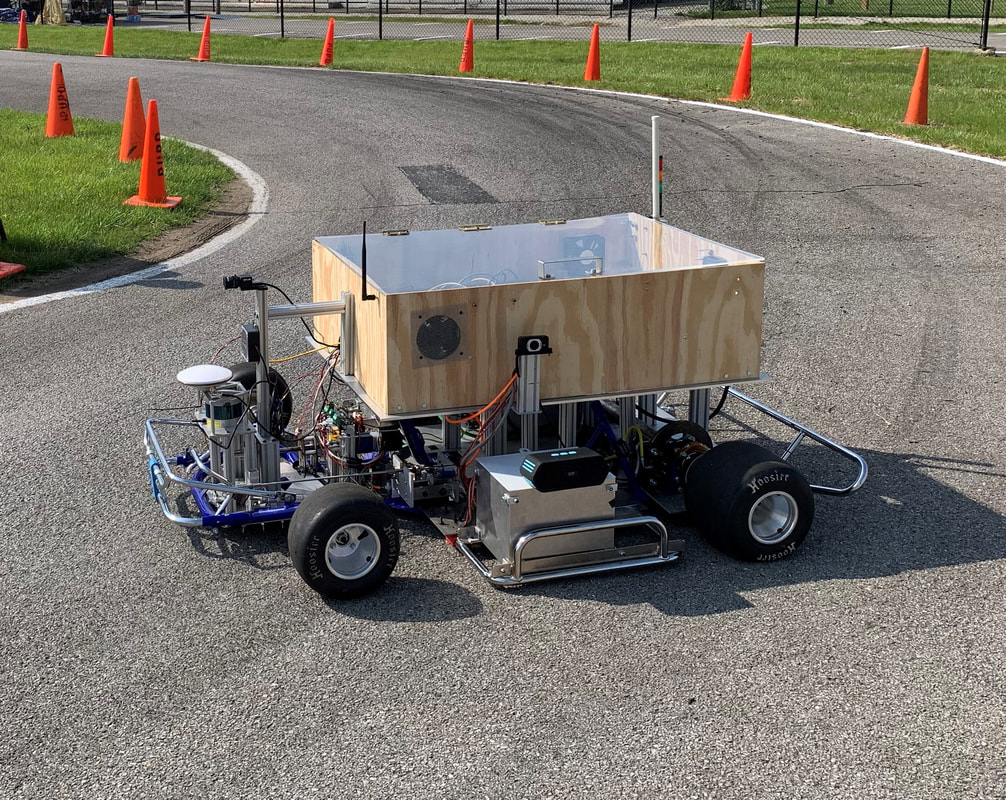
Meet Rigatoniii, the formidable entrant from RoboRacing that clinched a remarkable 2nd place in the fiercely contested 2021 evGrand Prix Autonomous competition. In my role as Mechanical Lead during that pivotal year, I spearheaded the comprehensive design of Rigatoniii, overseeing critical aspects such as the steering, drive, and braking systems. Additionally, I played a pivotal role in strategically positioning the electrical components and sensors for optimal performance.
|
|
|
I engineered a Python-based GUI program that offers a dynamic visualization of a computer vision system's fine-tuning process for studs affixed to car bodies, crucial for identifying potential issues. In this process, robots meticulously position a stud on a car body, and the computer vision system optimizes the final placement. The program extracts data from the stud gun robot's extensive logs, encompassing every stud placement operation. Notably, it affords the flexibility to retroactively visualize any number of studs from any selected date. This innovative tool was conceived with the goal of pinpointing the root causes of stud gun robot failures and enabling proactive replacement scheduling.
|
|
|
Introducing a cutting-edge Field Ion Microscope (FIM) test chamber, a pivotal component in the realm of microscopy. FIM operates by harnessing intense electric fields within an ultra-high vacuum environment, ionizing a minuscule metal tip to generate ions. These ions are then precisely manipulated along a predefined path by the electric field. The primary purpose of this test chamber is to validate the optimal functionality of the FIM system. In my capacity, I led the design process for a substantial portion of this chamber, overseeing critical tasks including component placement and meticulous material selection.
|

|
